.jpg)
.jpg)
.jpg)
.jpg)
Nema 14 (35mm) gibrid ädim motory, bipolýar, 4 simli, ACME simli winti, 1.8° ädim burçy, ýokary öndürijilikli.
Nema 14 (35mm) gibrid ädim motory, bipolýar, 4 simli, ACME simli winti, 1.8° ädim burçy, ýokary öndürijilikli.
Bu 35 mm gibrid ädim motory üç görnüşde elýeterlidir: daşarky hereketlendiriji, ok arkaly hereketlendiriji we berk ok arkaly hereketlendiriji. Siz öz aýratyn zerurlyklaryňyza görä saýlap bilersiňiz.
VSM35HSM standart daşarky motoryň kontur çyzgysy
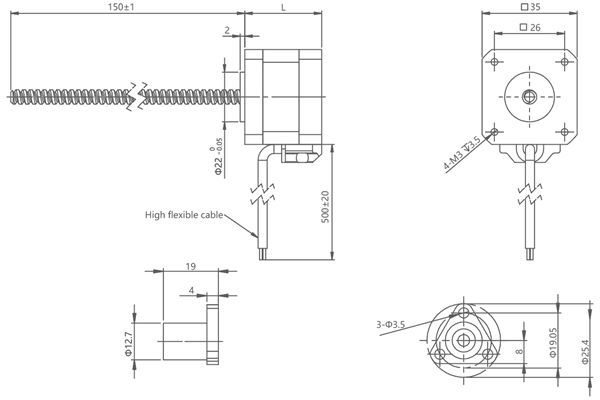
Bellikler:
Gurşun wintiň uzynlygyny öz islegiňize görä sazlap bolýar
Gurşun wintiň ujunda ýörite işlenilen işleme mümkin
Beýanlar
| Önümiň ady | 35 mm gibrid ädim motorlary |
| Model | VSM35HSM |
| Görnüş | gibrid ädim motorlary |
| Ädim burçy | 1.8° |
| Voltaž (V) | 1.4/ 2.9 |
| Tok (A) | 1.5 |
| Garşylyk (Om) | 0.95 / 1.9 |
| Induktiwlik (mH) | 1.5 /2.3 |
| Gurşun simler | 4 |
| Motoryň uzynlygy (mm) | 35/45 |
| Daşky gurşawyň temperaturasy | -20℃ ~ +50℃ |
| Temperaturanyň ýokarlanmagy | Maks. 80 müň. |
| Dielektrik güýji | 1mA Maks. @ 500V, 1KHz, 1sek. |
| Izolýasiýa garşylygy | 100MΩ Min. @500Vdc |
Sertifikatlar

Elektrik parametrleri:
| Motoryň ululygy | Voltaž /Faza (V) | Häzirki /Faza (A) | Garşylyk /Faza (Ω) | Induktiwlik /Faza (mH) | Sany Gurşun simler | Rotor inertsiýasy (g.sm2) | Motoryň agramy (g) | Motoryň uzynlygy L (mm) |
| 35 | 1.4 | 1.5 | 0.95 | 1.4 | 4 | 20 | 190 | 34 |
| 35 | 2.9 | 1.5 | 1.9 | 3.2 | 4 | 30 | 230 | 47 |
Gurşun wintiň tehniki häsiýetnamalary we iş görkezijileri
| Diametr (mm) | Gurşun (mm) | Ädim (mm) | Öz-özüni gulplaýan güýç bilen öçüriň (D) |
| 6.35 | 1.27 | 0.00635 | 150 |
| 6.35 | 3.175 | 0.015875 | 40 |
| 6.35 | 6.35 | 0.03175 | 15 |
| 6.35 | 12.7 | 0.0635 | 3 |
| 6.35 | 25.4 | 0.127 | 0 |
Bellik: Gurşun wintiň has giňişleýin aýratynlyklary üçin biziň bilen habarlaşyň.
35 mm gibrid ädim motorlarynyň standart ele salnan motoryň kontur çyzgysy
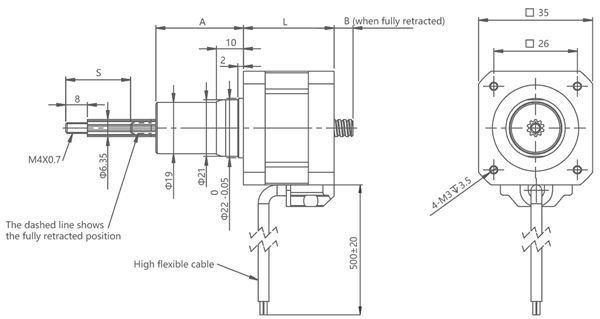
Bellikler:
Gurşun wintiň ujunda ýörite işlenilen işleme mümkin
| Stroke S (mm) | A ölçegi (mm) | Ölçeg B (mm) | |
| L = 34 | L = 47 | ||
| 12.7 | 20.6 | 8.4 | 0 |
| 19.1 | 27 | 14.8 | 0.8 |
| 25.4 | 33.3 | 21.1 | 7.1 |
| 31.8 | 39.7 | 27.5 | 13.5 |
| 38.1 | 46 | 33.8 | 19.8 |
| 50.8 | 58.7 | 46.5 | 32.5 |
| 63.5 | 71.4 | 59.2 | 45.2 |
35 mm gibrid ädim motorynyň standart üsti bilen berkidilen motoryň kontur çyzgysy
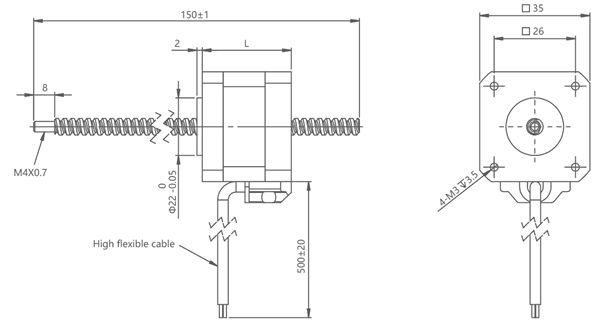
Bellikler:
Gurşun wintiň uzynlygyny öz islegiňize görä sazlap bolýar
Gurşun wintiň ujunda ýörite işlenilen işleme mümkin
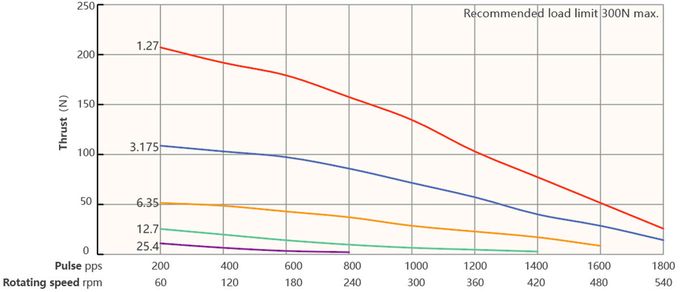
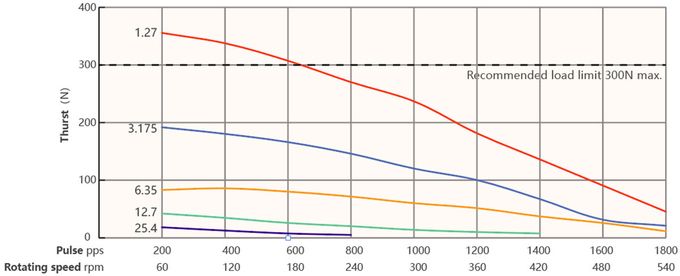
Tizlik we itek egrisi:
35 seriýaly 34 mm uzynlykdaky bipolýar Chopper sürüjisi
100% tok impuls ýygylygy we itekleme egrisi (Φ6.35mm gurşun winti)
35 seriýaly 47 mm uzynlykdaky bipolýar Chopper sürüjisi
100% tok impuls ýygylygy we itekleme egrisi (Φ6.35mm gurşun winti)
| Gurşun (mm) | Çyzykly tizlik (mm /s) | ||||||||
| 1.27 | 1.27 | 2.54 | 3.81 | 5.08 | 6.35 | 7.62 | 8.89 | 10.16 | 11.43 |
| 3.175 | 3.175 | 6.35 | 9.525 | 12.7 | 15.875 | 19.05 | 22.225 | 25.4 | 28.575 |
| 6.35 | 6.35 | 12.7 | 19.05 | 25.4 | 31.75 | 38.1 | 44.45 | 50.8 | 57.15 |
| 12.7 | 12.7 | 25.4 | 38.1 | 50.8 | 63.5 | 76.2 | 88.9 | 101.6 | 114.3 |
| 25.4 | 25.4 | 50.8 | 76.2 | 101.6 | 127 | 152.4 | 177.8 | 203.2 | 228.6 |
Synag şerti:
Çapgyç hereketlendirijisi, rampasyz, ýarym mikro ädimli, hereketlendirijiniň woltlylygy 40V
Ulanylyş ugurlary
Senagat awtomatlaşdyrmasy:35 mm gibrid ädim motorlary senagat awtomatlaşdyrma ulgamlarynda giňden ulanylýar. Olar CNC enjamlary, saýlama we ýerleşdirme robotlary, konweýer ulgamlary we awtomatlaşdyrylan ýygnamak liniýalary ýaly dürli maşynlarda we enjamlarda ulanylýar. Bu motorlar takyk ýerleşdirmegi, ýokary moment çykaryşyny we ygtybarly işlemegi üpjün edýär, bu bolsa olary talapkär senagat gurşawlary üçin gowy amatly edýär.
Robototehnika:Robototehnika 35 mm gibrid ädim motorlarynyň giňden ulanylýan esasy pudagydyr. Bu motorlar, adatça, robot gollarynyň we manipulýatorlarynyň birleşmelerinde ulanylýar we robotyň hereketlerini takyk dolandyrmagy üpjün edýär. Olar ajaýyp gaýtalanmagy we ýerleşiş takyklygyny üpjün edýär, bu bolsa robotlara senagat, lukmançylyk we ylmy-barlag ulgamlarynda çylşyrymly işleri ýerine ýetirmäge mümkinçilik berýär.
Dokma enjamlary:Dokma senagatynda 35 mm gibrid ädim motorlary dürli dokma enjamlarynda, mysal üçin, örme maşynlarynda, keşde maşynlarynda we mata kesýän enjamlarda ulanylýar. Bu motorlar iňňeleriň, mata iýmitlendiriji mehanizmleriň we kesiji gurallaryň hereketini takyk dolandyrmagy üpjün edýär we takyk we ýokary hilli dokma önümçiligini üpjün edýär.
Gaplama enjamlary:Gaplama maşynlary doldurmak, möhürlemek, etiketlemek we gaplamak ýaly işler üçin takyk we sinhronlaşdyrylan hereketleri talap edýär. 35 mm gibrid ädim motorlary bu maşynlarda takyk ýerleşdirmegi, ýokary momenti we ýumşak hereketi dolandyrmak ukyby sebäpli giňden ulanylýar. Olar azyk we içgiler, derman serişdeleri we sarp ediş harytlary ýaly pudaklarda netijeli we ygtybarly gaplama işlerini amala aşyrmaga mümkinçilik berýär.
Laboratoriýa awtomatlaşdyrmasy:35 mm gibrid ädim motorlary suwuklyk bilen işleýän robotlar, nusga taýýarlamak enjamlary we diagnostika gurallary ýaly laboratoriýa awtomatlaşdyrma ulgamlarynda ulanylyşyny tapýar. Bu motorlar pipetka, nusga bilen işleýän we beýleki laboratoriýa işleri üçin takyk we gaýtalanýan ýerleşişi üpjün edýär, awtomatlaşdyrmany ýeňilleşdirýär we öndürijiligi ýokarlandyrýar.
Sarp ediji elektronikasy:Bu ölçegdäki gibrid ädim motorlaryny sarp ediji elektron enjamlarynda hem tapyp bolýar. Olar 3D printerlerde, kamera gimballarynda, öý awtomatlaşdyrma ulgamlarynda we sarp ediji robototehnikasynda ulanylýar. Bu motorlar bu enjamlardaky hereketleriň we funksiýalaryň takyk dolandyrylmagyna mümkinçilik berýär, olaryň işini we ulanyjy tejribesini ýokarlandyrýar.
Artykmaçlyk
Ýokary takyklyk:Bu hereketlendirijiler ýokary takyklykly pozisiýany dolandyrmak mümkinçiligini üpjün edýär. Olar adatça ýokary ädim burç çözgüdine eýedirler, bu bolsa kiçi ädimleri we takyk pozisiýany kesgitlemäge mümkinçilik berýär. Bu bolsa olary pozisiýa ulgamlary, takyk gurallar we ş.m. ýaly takyk hereketi dolandyrmak talap edýän ulanylyşlar üçin örän amatly edýär.
Pes tizlikde gowy iş görkezijisi:35 mm gibrid ädim motorlary pes tizlikde gowy işleýär. Olar ýokary moment çykaryşyny üpjün edip bilýärler, bu bolsa ýokary başlangyç momentini talap edýän ýa-da pes tizlikde işleýän programmalar bilen başa çykmagy aňsatlaşdyrýar. Bu bolsa olary lukmançylyk enjamlary, takyk gurallar we başgalar ýaly takyk dolandyryşy we haýal hereketi talap edýän ýagdaýlar üçin amatly edýär.
Ýönekeý sürüji dolandyryşy:Bu motorlar deňeşdirme boýunça ýönekeý hereketlendiriji dolandyryşa eýedir. Olar adatça açyk aýlawly dolandyryş bilen dolandyrylýar, bu bolsa ulgamyň çylşyrymlylygyny we çykdajylaryny azaldýar. Dogry hereketlendiriji zynjyrlary ädimli motorlaryň takyk ýerleşýän ýerini we tizligini dolandyrmagy üpjün edip biler.
Ygtybarlylyk we Çydamlylyk:35 mm gibrid ädim motorlary ýokary ygtybarlylygy we berkligi üpjün edýär. Olar, adatça, uzak wagtlap işlemegiň we ýygy-ýygydan başlamagyň we durmagyň dowamynda durnukly işlemegini saklaýan ýokary hilli magnit dizaýnlaryndan we materiallaryndan öndürilýär. Bu bolsa, olary uzak wagtlap işlemegi we ýokary ygtybarlylygy talap edýän ulanyşlar üçin amatly edýär.
Çalt jogap we dinamiki iş görkezijileri:Bu motorlar çalt jogap beriş wagtyna we gowy dinamiki öndürijilige eýedir. Olar gysga wagtyň içinde takyk pozisiýa üýtgeşmelerini amala aşyryp bilýärler we çalt tizlenip we durup bilýärler. Bu bolsa olary robototehnika, awtomatlaşdyrma enjamlary we ş.m. ýaly çalt jogap beriş we ýokary dinamiki öndürijiligi talap edýän ulanyşlar üçin amatly edýär.
Ulanylyş ugurlarynyň giň gerimi:35 mm gibrid ädim motorlary dürli ugurlarda we ulanylyşlarda ulanylýar. Olar senagat awtomatlaşdyrmasy, robot tehnikasy, lukmançylyk enjamlary, dokma enjamlary, gaplama enjamlary, laboratoriýa awtomatlaşdyrmasy we başga-da köp ugurlar üçin amatlydyr. Bu motorlaryň artykmaçlyklary olary köp ulanylyş senariýalary üçin ideal edýär.
Motory saýlamak üçin talaplar:
►Hereket/montaž ugry
►Ýük talaplary
►Insult talaplary
►Emal işleriniň soňky talaplary
►Takyklyk talaplary
►Kodlaýjynyň pikir alyş-çalşygynyň talaplary
►El bilen sazlamak talaplary
►Daşky gurşaw talaplary
Önümçilik sehi



-300x300.jpg)
-300x300.jpg)
-300x300.jpg)
-300x300.jpg)
-300x300.jpg)