





Nema 23 (57mm) gibrid şarly wintli ädim motory 1.8° ädim burçy Lukmançylyk diagnostika enjamlary üçin 4 gurşun simler
Nema 23 (57mm) gibrid şarly wintli ädim motory 1.8° ädim burçy Lukmançylyk diagnostika enjamlary üçin 4 gurşun simler
Nema 23 (57mm) gibrid ädim motory, bipolýar, 4 simli, şar winti, pes ses, uzak ömür, ýokary öndürijilik, CE we RoHS sertifikatlary.
Uly ýük göterijilik, kiçi titreme, pes ses, çalt tizlik, çalt jogap, ýumşak işleýiş, uzak ömür, ýokary ýerleşiş takyklygy (±0.005 mm çenli)
Beýany
| Önümiň ady | 57 mm gibrid şarly wintli ädim motory |
| Model | VSM57BSHSM |
| Görnüş | gibrid ädim motorlary |
| Ädim burçy | 1.8° |
| Voltaž (V) | 2.3 / 3 / 3.1 / 3.8 |
| Tok (A) | 3 / 4 |
| Garşylyk (Om) | 0.75 / 1 / 0.78 / 0.95 |
| Induktiwlik (mH) | 2.5 / 4.5 / 3.3 / 4.5 |
| Gurşun simler | 4 |
| Motoryň uzynlygy (mm) | 45 / 55 / 65 / 75 |
| Daşky gurşawyň temperaturasy | -20℃ ~ +50℃ |
| Temperaturanyň ýokarlanmagy | Maks. 80 müň. |
| Dielektrik güýji | 1mA Maks. @ 500V, 1KHz, 1sek. |
| Izolýasiýa garşylygy | 100MΩ Min. @500Vdc |
Sertifikatlar

Elektrik parametrleri:
| Motoryň ululygy | Voltaž /Faza (V) | Häzirki /Faza (A) | Garşylyk /Faza (Ω) | Induktiwlik /Faza (mH) | Sany Gurşun simler | Rotor inertsiýasy (g.sm2) | Motoryň agramy (g) | Motoryň uzynlygy L (mm) |
| 57 | 2.3 | 3 | 0.75 | 2.5 | 4 | 150 | 580 | 45 |
| 57 | 3 | 3 | 1 | 4.5 | 4 | 300 | 710 | 55 |
| 57 | 3.1 | 4 | 0.78 | 3.3 | 4 | 400 | 880 | 65 |
| 57 | 3.8 | 4 | 0.95 | 4.5 | 4 | 480 | 950 | 75 |
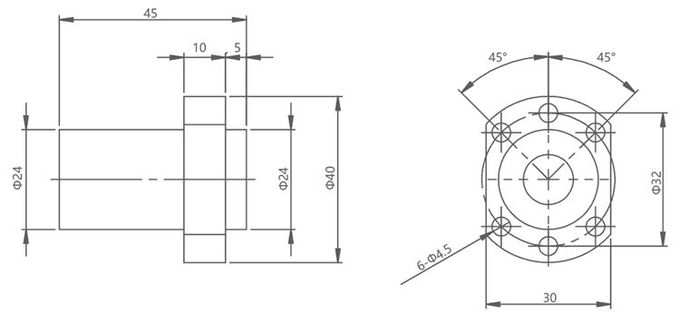
VSM57BSHSM standart daşarky motoryň kontur çyzgysy:
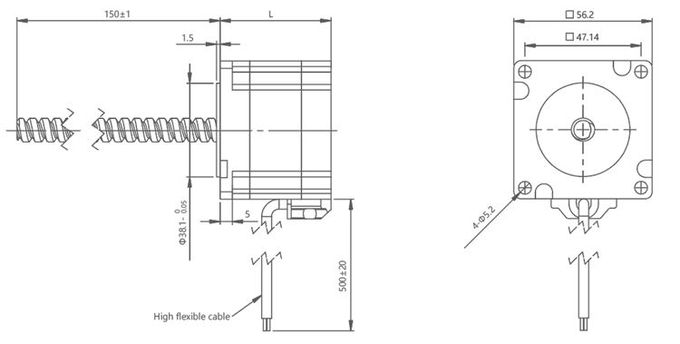
Bellikler:
Gurşun wintiň uzynlygyny öz islegiňize görä sazlap bolýar
Gurşun wintiň ujunda ýörite işlenilen işleme mümkin
Şarikli wintleriň has giňişleýin aýratynlyklary üçin biziň bilen habarlaşyň.
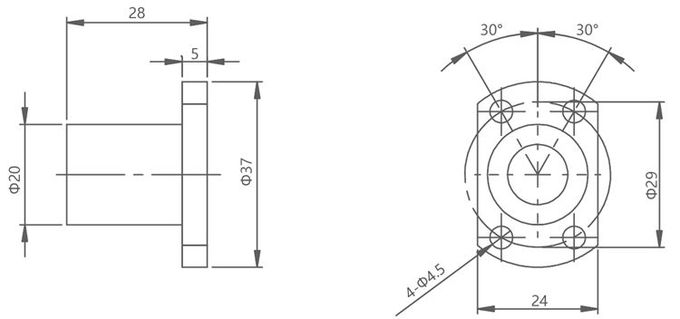
VSM57BSHSMBüýrük gaýka 1202 kontur çyzgysy:
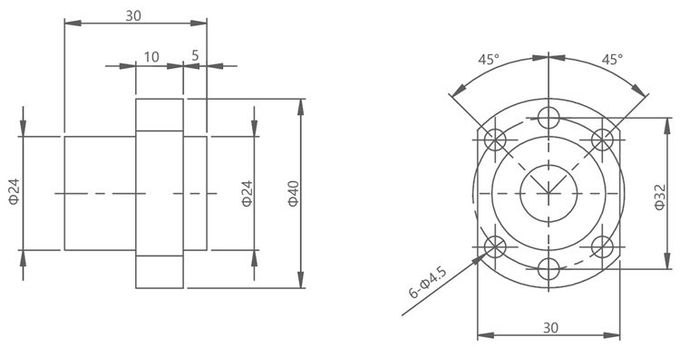
VSM57BSHSMBüýrük gaýka 1205 kontur çyzgysy:
VSM57BSHSMBüýrük gaýka 1210 kontur çyzgysy:
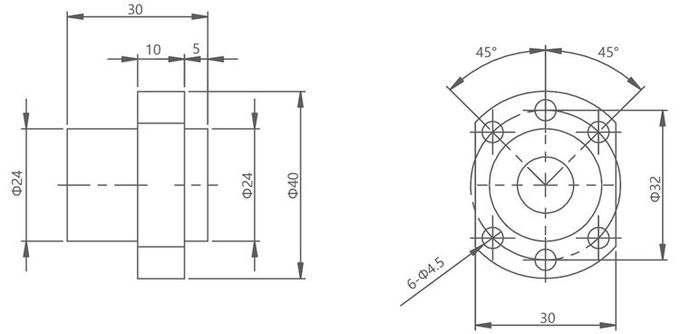
VSM57BSHSMBüýrük gaýka 1210 kontur çyzgysy:
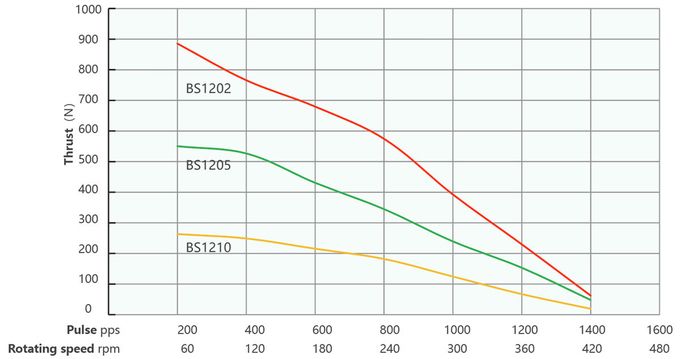
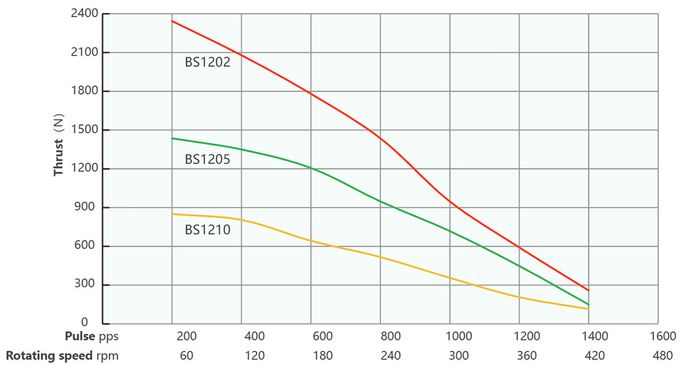
Tizlik we itek egrisi
57 seriýaly 45 mm uzynlykdaky bipolýar Chopper sürüjisi
100% tok impuls ýygylygy we itekleme egrisi
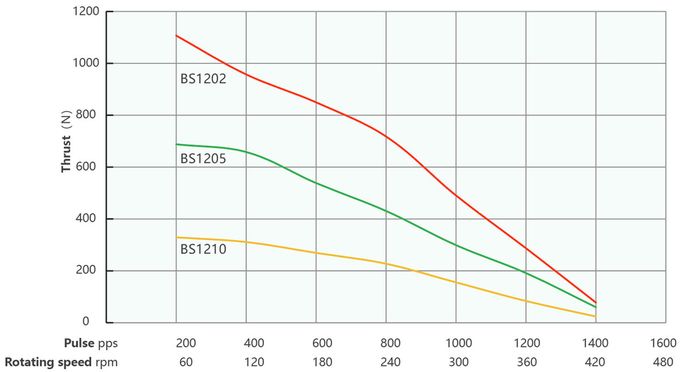
57 seriýaly 55 mm uzynlykdaky bipolýar Chopper sürüjisi
100% tok impuls ýygylygy we itekleme egrisi
| Gurşun (mm) | Çyzykly tizlik (mm/s) | |||||||
| 2 | 2 | 4 | 6 | 8 | 10 | 12 | 14 | 16 |
| 5 | 5 | 10 | 15 | 20 | 25 | 30 | 35 | 40 |
| 10 | 10 | 20 | 30 | 40 | 50 | 60 | 70 | 80 |
Synag şerti:Çapgyç hereketlendirijisi, rampasyz, ýarym mikro ädimli, hereketlendirijiniň woltlylygy 40V
57 seriýaly 65 mm uzynlykdaky bipolýar Chopper sürüjisi
100% tok impuls ýygylygy we itekleme egrisi
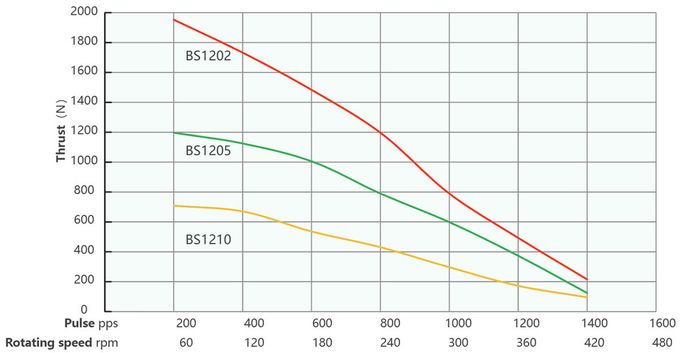
57 seriýaly 75 mm uzynlykdaky bipolýar Chopper sürüjisi
100% tok impuls ýygylygy we itekleme egrisi
| Gurşun (mm) | Çyzykly tizlik (mm/s) | |||||||
| 2 | 2 | 4 | 6 | 8 | 10 | 12 | 14 | 16 |
| 5 | 5 | 10 | 15 | 20 | 25 | 30 | 35 | 40 |
| 10 | 10 | 20 | 30 | 40 | 50 | 60 | 70 | 80 |
Synag şerti:Çapgyç hereketlendirijisi, rampasyz, ýarym mikro ädimli, hereketlendirijiniň woltlylygy 40V
Ulanylyş ugurlary:
Lukmançylyk diagnostika enjamlary:57 mm gibrid şarly wintli basgançakly motorlar surat skanerleri, KT skanerleri, rentgen enjamlary, MRT enjamlary we ş.m. ýaly lukmançylyk diagnostika enjamlarynda ulanylyp bilner. Olaryň ýokary takyklykly pozisiýa gözegçiligi we durnuklylygy lukmançylyk suratlaryny almak we işläp taýýarlamak wagtynda takyk hereketi we ýerleşişi üpjün edýär.
Ýaşaýyş ylmynyň gurallary:Ýaşaýyş ylmy barlaglarynda we tejribelerinde 57 mm gibrid şarly wintli ädimli motorlar awtomatlaşdyrylan suwuklyk gaýtadan işleýän ulgamlarda, ýokary öndürijilikli skrining enjamlarynda, öýjük ösdürip ýetişdiriş enjamlarynda, gen sekwenserlerinde we başgalarda ulanylýar. Bu motorlaryň ýokary takyklygy we ygtybarlylygy olara tejribe enjamlarynda takyk hereket we pozisiýa gözegçiligine bolan islegi kanagatlandyrmaga mümkinçilik berýär.
Robototehnika:57 mm gibrid şarly wintli basgançakly motorlar robototehnikada bogun hereketlendirmeleri, robot gol hereketini we takyk ýerleşdirmegi üçin giňden ulanylýar. Bu motorlar robototehnika ulanylyşynda takyk hereket we dolandyryş talabyny kanagatlandyrmak üçin ýokary moment, ýokary çözgüt we pes ses bilen häsiýetlendirilýär.
Lazer enjamlary:57 mm gibrid şarly wintli ädim motorlary lazer enjamlarynda fokus sazlamak, panorama stoly we optiki ýoly dolandyrmak ýaly işler üçin ulanylyp bilner. Onuň ýokary takyklykdaky pozisiýany dolandyrmak we durnuklylygy lazer şöhlesiniň takyk fokuslanmagyny we ýerleşdirilmegini amala aşyrmaga mümkinçilik berýär.
Analitik gurallar:Dürli görnüşli laboratoriýa analitiki gurallarynda 57 mm gibrid şarly wintli ädimli motorlar awtomatlaşdyrylan nusga işlemede, nusga iýmitlendirme ulgamlarynda, suwuk hromatograflarda, gaz hromatograflarynda we ş.m. ulanylyp bilner. Bu motorlaryň ýokary takyklykly hereketi we durnukly işlemegi laboratoriýa analiziniň takyklygyny we netijeliligini ýokarlandyrmakda möhüm rol oýnaýar.
Ýarymgeçiriji we elektron önümçilik enjamlary:57 mm gibrid şarly wintli ädim motorlary ýarymgeçiriji we elektron önümçilik enjamlarynda takyk ýerleşdirmek we awtomatlaşdyrmak üçin ulanylýar. Mysal üçin, olar ýarymgeçiriji çip synag enjamlarynda, gaplama maşynlarynda, ýüzi montaj tehnologiýasynda, çap edilen elektron plata önümçiliginde we beýleki ugurlarda ýokary tizlikli, ýokary takyklykly we ygtybarly hereket gözegçiligini üpjün etmek üçin ulanylyp bilner.
Standart däl awtomatlaşdyrma enjamlary we awtomatlaşdyrma enjamlarynyň dürli görnüşleri:57 mm gibrid şarly wintli basgançakly motorlar standart däl awtomatlaşdyrma enjamlarynyň we awtomatlaşdyrylan önümçilik liniýalarynyň giň görnüşi üçin amatlydyr. Olar ýerleşdiriş enjamlarynda, awtomatiki ýygnamak ulgamlarynda, gaplama enjamlarynda, çap ediş enjamlarynda, dokma enjamlarynda we ş.m. ulanylyp bilner. Olar dürli ugurlarda awtomatlaşdyrma zerurlyklaryny kanagatlandyrmak üçin takyk pozisiýa gözegçiligini we ygtybarly hereket öndürijiligini üpjün edýär.
Artykmaçlyk
Ýokary moment-inertiýa gatnaşygy:Gibrid şarly wintli ädimli hereketlendirijiler ýokary moment-inertiýa gatnaşygyna eýedir, bu bolsa olaryň ölçeglerine we agramyna görä uly moment çykaryp bilýändigini aňladýar. Bu bolsa olary robototehnika, CNC enjamlary we awtomatlaşdyrma ulgamlary ýaly ykjam görnüşde ýokary moment talap edýän ulanyşlar üçin ideal edýär.
Ýokary tizlenme we haýallama:Bu hereketlendirijiler çalt tizlenmäge we haýallamaga ukyplydyr, bu bolsa çalt we takyk hereketlere mümkinçilik berýär. Rotoryň pes inersiýasy we ýokary moment çykyşy hereketlendirijiniň dolandyryş signallaryna çalt jogap bermegine mümkinçilik berýär, bu bolsa işe girizmek-durmak wagtyny çaltlaşdyrýar we ulgamyň umumy işini gowulandyrýar.
Ýumşak Mikrobasgançlyk:Gibrid şarly wintli ädim hereketlendirijileri mikro ädimleme işlemesi üçin gowy amatlydyr, bu bolsa has inçe çözgüt we has ýumşak hereket dolandyryşyny üpjün edýär. Mikro ädimleme her bir doly ädimi has kiçi kiçi ädimlere bölýär, ädimiň ölçegini azaldýar we titreme, şowhun we rezonans täsirlerini iň pes derejä düşürýär. Bu aýratynlyk, esasanam, 3D printerler we çyzykly pozisiýa ulgamlary ýaly ýumşak we takyk hereket talap edýän programmalarda peýdalydyr.
Pes täsir:Bu hereketlendirijilerdäki şarly wint mehanizmi rotor bilen ýüküň arasyndaky oýnama ýa-da boşluk bolan yza serpikmäni azaltmaga kömek edýär. Pes yza serpikme takyk ýerleşdirmegi we gaýtalanmagy üpjün edýär, sebäbi ugurlary üýtgedende ýa-da hereketi yzyna serpikdirende hereketiň ýitgisi minimal bolýar. Bu, saýlama we ýerleşdirme maşynlary we optiki ulgamlar ýaly takyk we gaýtalanýan ýerleşdirmegi talap edýän ulanyşlar üçin örän möhümdir.
Ýokary dinamiki jogap:Gibrid ädim hereketlendirijisiniň we şarly wint mehanizminiň utgaşmasy ýokary dinamiki jogaby üpjün edýär, ýagny hereketlendiriji dolandyryş signalyndaky üýtgeşmeleri çalt we takyk yzarlap bilýär. Bu jogap beriş ukyby ýokary tizlikli işläp bejeriş we dinamiki hereket dolandyryş ulgamlary ýaly tizlikde, ugurda ýa-da ýagdaýda çalt üýtgeşmeleri öz içine alýan ulanyşlar üçin möhümdir.
Termal Netijelilik:Gibrid şarly wintli basgançakly motorlar gowy termal netijelilige eýe bolmak üçin niýetlenendir, bu bolsa iş wagtynda netijeli ýylylyk ýaýramagyna mümkinçilik berýär. Bu bolsa, hatda uzak wagtlap ulanylanda ýa-da kyn ulanyşlarda hem, gyzgynlygyň öňüni almaga kömek edýär we motoryň durnukly işlemegini üpjün edýär.
Bahaly çözgüt:Gibrid şarly wintli basgançakly motorlar ýokary takyklyk we moment talap edýän ulanyşlar üçin tygşytly çözgüt hödürleýär. Has çylşyrymly we gymmat serwo motor ulgamlary bilen deňeşdirilende, gibrid basgançakly motorlar öndürijilik, çykdajy we ulanmagyň aňsatlygy arasynda deňagramlylygy üpjün edýär. Olar köplenç hiline we öndürijiligine zyýan ýetirmezden, bahasy möhüm faktor bolan ulanyşlar üçin iň gowy saýlawdyr.
Motory saýlamak üçin talaplar:
►Hereket/montaž ugry
►Ýük talaplary
►Insult talaplary
►Emal işleriniň soňky talaplary
►Takyklyk talaplary
►Kodlaýjynyň pikir alyş-çalşygynyň talaplary
►El bilen sazlamak talaplary
►Daşky gurşaw talaplary
Önümçilik sehi






